






A l’ESILV, le numérique est ancré au projet pédagogique de l’école. Parmi les principaux domaines d’expertise qui animent les majeures du cycle ingénieur : la robotique.
Tout au long du cursus ingénieur, la pédagogie par projets permet aux étudiants de se projeter dans leurs futurs métiers et de se développer globalement : expertise technologique et scientifique, capacité de mener un projet de but en but, travail en équipe…
Et c’est dans ce type d’activité aussi que naissent et se développent des passions liées aux technologies et aux solutions de l’industrie du futur. Zoom sur trois projets de la promo 2023, en lien avec les enseignements de la majeure Industrie et robotique.
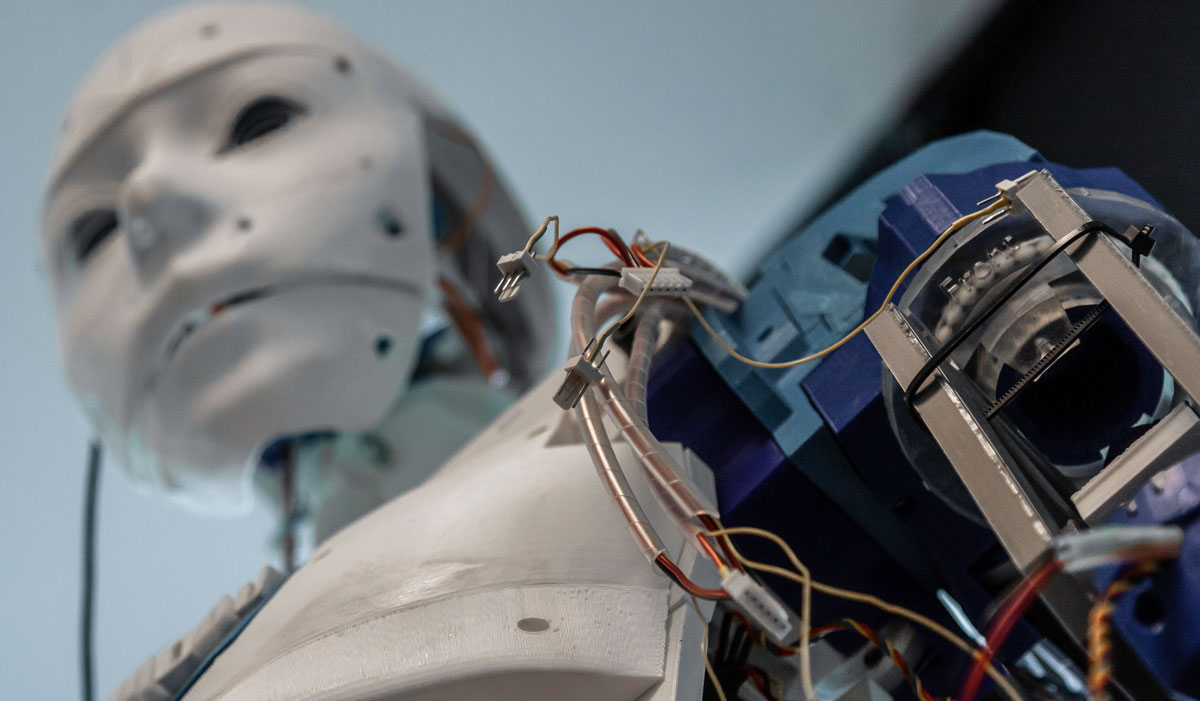
Développement de robot humanoïde en collaboration avec Da Vinci Bot

Dans le cadre de mon projet d’innovation industrielle d’A4, j’ai travaillé en collaboration avec l’association de robotique du pôle, DaVinciBot, sur le futur robot humanoïde du pôle, JASPER, qui est le successeur d’InMoov.
Pour ce projet, l’équipe se compose de sept étudiants en A3, une étudiante en A2 et moi-même. L’équipe était dynamique malgré quelques difficultés en matière de planification dues au fait que nous ne sommes pas tous de la même année. Nos créneaux de projet ne coïncident pas forcément, il a donc fallu bien s’organiser et surtout bien planifier les travaux à effectuer. Nous avons tout de même réalisé un bon travail. Nous pouvions compter sur les présidents et le responsable projet de DaVinciBot afin de nous aiguiller dans nos réflexions.
L’objectif de cette année était de fabriquer le tronc du robot en métal. Pour cela le projet s’est déroulé en plusieurs étapes : la première consistait à effectuer un état de l’art afin de mettre en place les bases théoriques nécessaires à la mise en place de la structure du tronc et aux choix à venir concernant les matériaux, les moteurs, les actionneurs et les procédés d’usinage. Le squelette du robot est ainsi en aluminium. Une fois la solution imaginée, nous avons modélisé la structure (la colonne vertébrale, les épaules et la cavité abdominale) et les différentes pièces afin de valider la structure du tronc.
Ensuite, nous avons réalisé un premier prototype imprimé en 3D : celui-ci nous a permis de vérifier certains mouvements et d’identifier d’éventuels problèmes ou les points à améliorer. Une fois ce travail effectué, nous avons réalisé, à l’aide de la découpe laser, un prototype fonctionnel en taille réelle. Sur ce dernier, les quatre actionneurs sont asservis grâce à des potentiomètres et le moteur est mis en place. La dernière étape consistait en l’usinage des différentes pièces de l’assemblage du squelette du tronc. Nous avons pour cela utilisé le tour numérique ainsi que la fraiseuse au -1 au pôle.
Construction d’un robot autonome pour le transports de caisses – Moov’Bot

L’objectif de notre projet était de construire un robot autonome capable de transporter des caisses d’une maison au camion de déménagement en évitant les obstacles.
Pour ce faire nous avons dû répartir le travail en deux parties, la partie mécanique et la partie informatique. Nous avons tout d’abord commencé par effectuer des recherches afin de nous documenter sur le sujet.Une fois les nombreuses informations sur l’état de l’art rassemblées nous avons dessiné un plan de notre robot et ainsi commencé la partie modélisation.
Une fois ce plan en tête nous avons recherchés les meilleurs matériaux et composants pour l’assemblage de notre premier prototype du robot.
Après le départ de notre collègue Youssef à la fin du premier semestre, lui qui était le seul dont la majeur était orientée informatique, nous avons eu beaucoup de travail pour rédiger le code Arduino du robot, mais en travaillant en groupe et en multipliant nos essais, nous sommes finalement arrivés à construire un prototype fonctionnel.
Notre prototype est accompagné d’une modélisation sur laquelle une recherche poussée en résistance des matériaux nous a permis de régler parfaitement le dimensionnement en vue d’une future industrialisation.
Robot autonome by DaVinciBot pour la Coupe de France de Robotique 2022

Chaque année, la Coupe de France de Robotique met à défi les associations robotiques, appelées à concevoir et mettre au point des robots intelligents s’appuyant sur les compétences en électronique et de mécatronique des étudiants pour relever de nombreuses épreuves.
Le principe est simple : 2 équipes, une table, 100 secondes, dans laquelle les robots (2 maximum) de chaque équipe devront tenter de réaliser le plus de points possibles en interagissant avec les éléments de jeux présents sur la table. Nous sommes fiers d’y participer chaque année ! ( L’équipe DavinciBot)
En 2022, dans le cadre des projets d’innovation industrielle de 4e année (PI2), les membres de DaVinciBot ont conçu et programmé un robot autonome capable de réaliser des actions en lien avec la thématique de la Coupe de Robotique 2022 : Age of Bots.
