







« Swarm robotics » ou robotique en essaim : c’est une discipline encore naissante qui a pour but de mettre au point des robots collaboratifs capables d’accomplir certaines tâches que les robots complexes ne pourraient effectuer seuls. C’est également le dernier terrain de jeu des étudiants du parcours Innovation, Research and Manufacturing au sein du De Vinci Innovation Center.
Dans le cadre de l’espace intitulé « DVIC Swarm Robotics », plusieurs élèves-ingénieurs ESILV ont mis sur pied une plateforme de développement de robotique en essaim, à la fois terrestre et aérienne, qui permet de développer une intelligence artificielle collective des robots. Inspirées par ce qu’on appelle la « sociologie des machines », ces plateformes fonctionnent selon le modèle d’une « chorégraphie » des machines : il s’agit d’un essaim de robots capables de fonctionner en équipe pour résoudre des tâches complexes.
DVIC Drone Lab : drones pilotés par la main, motion capture, cartographie, algorithmes anticollision …
Développé en 2020 dans le cadre de l’espace « swarm robotics, le « DVIC Drone Lab » se présente comme un environnement d’expérimentation pour la robotique : créer des essaims de drones, coordonner les gestes humains et les drones, développer de multiples applications utilisant des mouvements précis des robots.
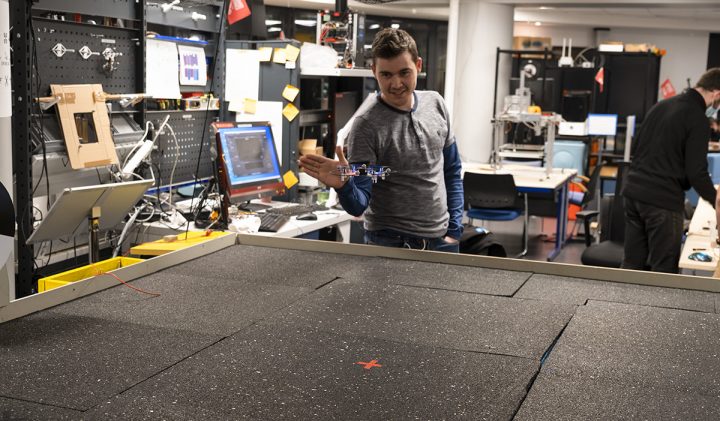
La plateforme de drones est conçue autour de 3 dispositifs qui volent ensemble et qui sont pilotés par la main.
« La main, c’est le principal outil de l’être humain pour contrôler son espace. Quand il s’agit de piloter des drones, la voix peut se porter très mal, les instructions sur un écran dans un environnement 3D, c’est très difficile, il n’y a rien de plus simple que de piloter avec sa main : on peut aussi imaginer un ustensile comme une baguette magique, mais le contrôle par la main permet de simplifier l’interaction entre l’homme et la machine », nous explique Clément Duhart, responsable du De Vinci innovation Center.
Entièrement autonome, le drone peut être piloté à l’aide des commandes gestuelles, grâce à une intelligence artificielle développée par Google, capable de reconnaître les signes effectués par les doigts d’une main à l’aide d’une image vidéo.

Le logiciel est capable d’analyser 21 points clés sur une main en 3D
Grâce à un système de motion capture, qui permet de détecter les drones avec une précision au quart de millimètre, les engins se localisent entre eux. Les étudiants testent plusieurs applications qui permettent la coordination de ces « compagnons ».
« Certains d’entre eux travaillent sur les drones eux-mêmes, d’autres travaillent sur les algorithmes anticollision, sur la réalité virtuelle pour faire de la cross-réalité. Cela permet de visualiser ces drones dans un environnement virtuel pour faciliter les entraînements de l’intelligence artificielle dans le système de navigation. »
Le tout, dans une démarche de « sociologie des machines » basée sur une intelligence collective qui ne nécessite pas de direction centrale ou de planification ; c’est une intelligence distribuée.
» L’idée, c’est de pouvoir manipuler des drones volants en vol stationnaire, capables de faire des trajectoires complexes, mais aussi faire collaborer la version un leader et plusieurs suiveurs, selon le modèle du vol en V des oiseaux. Si chaque drone essaie de maintenir une distance avec les drones qui l’entourent, naturellement, la forme de V des oiseaux apparaît. »
Grâce aux solutions de cartographie, les drones sont capables d’éviter les collisions.
« L’un des gros problèmes dans la robotique, c’est que le robot soit capable de se situer dans un environnement, et donc, qu’il puisse connaître cet environnement. Cette plateforme s’allie à une plateforme d’intelligence artificielle, basée notamment sur l’apprentissage par renforcement, qui a pour vocation à permettre au robot à fonctionner en collectivité et à cartographier une zone inconnue en 3D et partager une information pour pouvoir naviguer à l’intérieur », précise Clément Duhart.
RANE, une plateforme modulaire au sol conçue pour le travail en équipe
Une autre technologie développée dans le cadre de l’espace « swarm robotics » concerne RANE, une plateforme robotique modulaire à faible coût ayant la capacité de se déplacer en autonomie dans tout les environnements (ville, intérieur, nature) afin de répondre à une grande variété de missions.
La plateforme est exploitée dans le cadre du projet start-up Devo, porté par Teddy LECLERCQ et Thomas RAYNAL, étudiants de la promotion 2021, inspirés par les possibilités de la « visual localisation » utilisée dans la livraison de marchandise sur le dernier kilomètre.
« Nous créons une plateforme robotique qui a pour vocation de communiquer avec les autres plateformes de la flotte afin de répondre à différents problèmes », nous explique Thomas Reynal. « Parmi les cas d’usage, on peut noter la logistique du dernier kilomètre, le nettoyage des rues, l’assistance du personnel médical dans les hôpitaux et les EPHAD. Le champ des possibilités est infini, il faut juste adapter le module au client.
Par exemple, en ce qui concerne les soignants, on s’est rendu compte que 30 à 40% de leur temps de travail était consacré au transport et au déplacement des matériels dans tout l’hôpital, ce qui leur fait perdre du temps qui est précieux. Leur apporter 30% de temps en plus, ça pourrait permettre d’améliorer tout le système. Le robot est programmé pour apporter le matériel devant les chambres, à des horaires précis, ce qui permet aux médecins de juste arriver devant la chambre du patient, de prendre le matériel qui est sur la plateforme robotique et prodiguer des soins de façon améliorée. »
Grâce à ce projet développé au sein du De Vinci Innovation Center, la start-up DEVO pourra développer à terme une cinquantaine de robots qui couvriront de très nombreux marchés, de l’entretien urbain et la surveillance des zones au minage spatial et au bâtiment.










