








Les robots mimant la nature donnent naissance à des applications importantes dans de nombreuses industries, telles que le nucléaire, la chimie ou encore les eaux usées. Ces structures bio-inspirées représentent un terrain de recherche prometteur pour les enseignants-chercheurs de l’ESILV.
Swaminath VENKATESWARAN, enseignant-chercheur à l’ESILV, membre du Groupe Modeling du De Vinci Research Center, a été invité à présenter ses travaux sur les robots bio-inspirés autour de deux évenements importants pour la communauté scientifique : le salon Biomim’expo et le Congrès de la Société de Biomécanique à Monastir, en Tunisie.
Les travaux autour des robots bio-inspirés présentés au Biomim’expo 2022
Le salon Biomim’expo est le grand rendez-vous du biomimétisme et des innovations bio-inspirées. Organisée les 25 et 26 octobre derniers, l’édition 2022 réunissait comme chaque année des experts et des acteurs de toutes les disciplines scientifiques et dans tous les secteurs d’activités venus présenter leur innovations à la Cité des sciences et de l’industrie.
Parmi les chercheurs mis en avant lors de cet événement, Swaminath VENKATESWARAN, qui réalise ses travaux de recherche sur les aspects bio-inspirés dans le domaine de l’inspection des canalisations industrielles dans le cadre du Groupe Modelisation.
Les robots d’inspection de canalisation s’avèrent utiles pour prévenir les décès et les effets à long terme des rayonnements. Dans le cadre d’un projet de recherche avec AREVA, un robot d’inspection de canalisation a été proposé et développé avec la contribution des chercheurs du De Vinci Research Center.
Ce robot exploite la locomotion d’une chenille en six étapes pour se déplacer à l’intérieur d’un tuyau. Une chenille assure toujours un contact fort avec une surface lors de sa locomotion et cela en a été l’inspiration principale. Le robot de type chenille a été réalisé en utilisant des moteurs à courant continu, des systèmes de contrôle des mécanismes des jambes.
Les résultats provenant des modèles de force statique ont permis de réaliser des expériences à l’intérieur d’un tuyau de 74 mm de diamètre. Afin de traverser les coudes et les jonctions de tuyaux, un mécanisme de tenségrité composé de trois ressorts et d’un joint universel a été introduit dans le module du robot.

La tête du robot à l’intérieur du tuyau
Le mécanisme a été validé sous deux modes à savoir : Passif et Actif, permettant de comprendre ses limites d’inclinaison.
La nouvelle conception du robot qui se compose du module ver et de la tenségrité a ensuite été réalisée dans un logiciel de CAO par des approches d’optimisation. Cette nouvelle conception qui peut fonctionner à l’intérieur de tuyaux de 100 à 120 mm de diamètre ressemble à un modèle de trompe d’éléphant.
Ces robots d’inspection de canalisation peuvent sauver les humains de la mort et des effets des radiations à long terme. Afin d’avoir de bonnes forces de contact avec les parois des canalisations, les mécanismes de pattes sont utilisés car ils peuvent assurer un contact fort pour les configurations horizontales et verticales des canalisations.
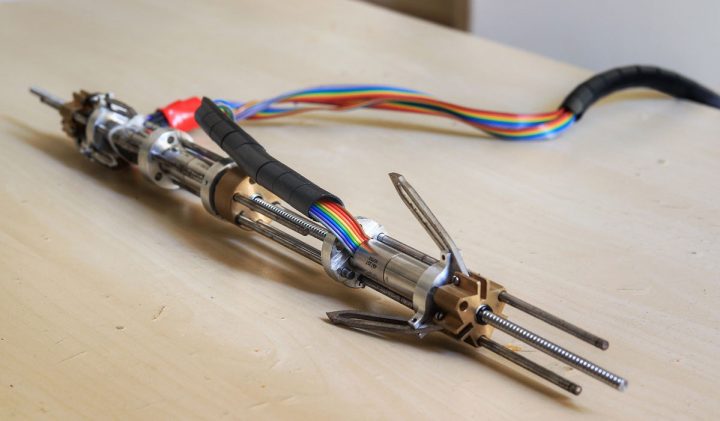
: Le robot avec des mécanismes de patte en état complètement serré
La locomotion de la chenille, d’autre part, aide à se déplacer pouce par pouce à l’intérieur du tuyau, ce qui peut être essentiel pour effectuer des activités d’inspection.
Des contributions autour du biomémimétisme et de la biorobotique présentées au Congrès de Monastir
Après la France, le Groupe Modeling est arrivé en Tunisie pour le 47ème congrès de la Société de Biomécanique, qui a eu lieu du 26 au 28 octobre, à Monastir. Dans le cadre de cet évenement, Swaminath VENKATESWARAN a présenté son article intitulé « Analyse de la stabilité d’un mécanisme de tenségrité couplé à un robot bio-inspiré ».
Cet article fait partie de la session spéciale du GdR BIOMIM 2088 qui porte exclusivement sur les thématiques du déplacement-mouvement biomimétisme et de la biorobotique. Les travaux seront bientôt publiés dans la revue Computer Methods in Biomechanics and Biomedical engineering.
Ce travail porte sur l’amélioration de la conception du robot d’inspection de canalisation. Même si un robot d’inspection de canalisation a été proposé plus tôt, il s’agissait d’un modèle rigide, ce qui limite son application aux profils de tuyaux droits.
Afin de travailler à l’intérieur des coudes et des jonctions de tuyaux, un mécanisme de tenségrité a été introduit entre chaque module du robot. Cependant, lors du déplacement à l’intérieur des tuyaux, ce mécanisme est sujet à une déviation causée par le poids du robot.
Afin de résoudre ce problème, les chercheurs du Modeling Groupe ont entamé une analyse de stabilité en mode statique. Cette analyse a aidé à déterminer la raideur du ressort qui sera nécessaire pour surmonter la déflexion.
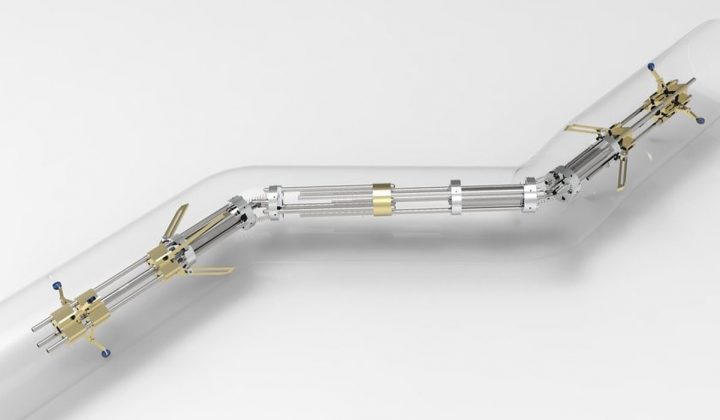
Les maquettes numériques de la trompe d’éléphant
Une posture en trompe d’éléphant sera obtenue à partir de l’ensemble robot résultant, qui permet de travailler à l’intérieur des coudes et des jonctions de tuyaux dans des conditions statiques et dynamiques.
Le modèle en trompe d’éléphant présente plusieurs avantages. Dans le contexte de ce robot d’inspection, lorsqu’un ensemble de mécanismes de patte (en particulier à l’avant) est serré avec des parois de tuyau, la force sera transmise de l’avant à l’arrière, ce qui permet au robot de traverser un coude de canalisation. Dans ces conditions, le tronc doit rester stable, ce qui est assuré par le mécanisme de tenségrité et la raideur des ressorts utilisés dans le mécanisme.
En savoir plus sur les dernières innovations en modelisation et mécanique numérique en école d’ingénieurs










