Un mois avant la compétition nationale de La Roche-sur-Yon, DaVinciBot a donné rendez-vous à plusieurs équipes de passionnés pour la Pré-Coupe de France de Robotique, édition 2022. Une journée de matchs, 4 équipes participantes, plein de technologies pour la construction de robots autonomes en école d’ingénieurs ou dans les hackerspaces … Retour sur la journée de pré-coupe du 22 avril, avec Davincibot.
L’édition 2022 de la Coupe de France de robotique se tiendra du 25 au 28 mai au Parc des Expositions de la Roche-sur-Yon (Vendée). Dans le cadre de l’édition 2022, les robots s’affronteront sur le thème « Age of Bots », inspiré par les fouilles archéologiques. Cette année encore, Davincibot, l’association de robotique du Pôle Léonard de Vinci, participe à cet événement. Pour faire leur marcher leur robot dans les meilleures conditions, les élèves-ingénieurs n’hésitent pas à mobiliser des technologies approfondies en cours et lors des projets en école d’ingénieurs.
La Pré-Coupe de robotique 2022 : fidèle à l’esprit de jeu de la Coupe de France
Afin de se préparer au mieux avant la Coupe de France de robotique, Davincibot propose chaque année une journée de pré-coupe au Pôle Léonard de Vinci. Cette 2e édition s’est organisée au Learning Center du Pôle Léonard de Vinci, sur une aire de jeu conçue spécialement pour l’occasion, et sous l’œil attentif de l’association Planète Sciences, représentée sur le campus de Paris La Défense par Adrien Podevin, chargé de mission robotique.
Inspirée par la « vraie » compétition, la pré-coupe de Davincibot doit respecter les mêmes règles d’homologation des robots et d’arbitrage et pour un événement au plus près des conditions réelles, elle s’appuie sur les mêmes outils de comptage de points que ceux employés lors de la Coupe de France de robotique. Malgré les efforts fournis par les membres du Davincibot sur près de 8 mois de travail en école d’ingénieurs, les imprévus étaient de la partie. D’où une anecdote qui résume bien l’atmosphère bon enfant de la compétition.
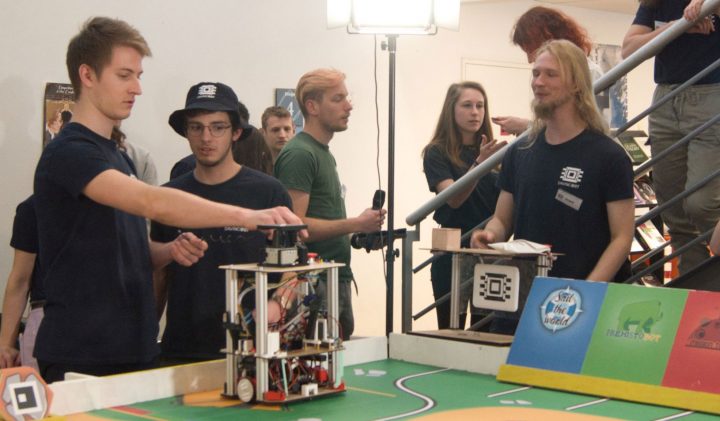
L’équipe Davincibot peaufine son robot
« Nous avons rencontré l’équipe Intech de Mines Telecom. Lors des compétitions de robotique, il arrive très souvent qu’il y ait un bug, un câble mal branché ou un élément imprévu qui fait que tout à coup votre robot ne marche plus. Cela nous est presque tous arrivé une fois durant la compétition ! Nous avons beaucoup ri avec Intech, car il y eu un match où nos 2 robots ont eu un bug et n’ont pas démarré. Nous avons du refaire un match, c’était très drôle. » , racontent les membres de Davincibot.
Cette année, dans le cadre de la Pré-coupe du Pôle Léonard de Vinci, 4 équipes se sont affrontées lors de matchs l’après-midi. La compétition de robots ne permettait pas de se lancer dans des combats ou des actions de destruction de l’adversaire. Le principe est le suivant : 2 équipes s’affrontent sur une table de jeu de 2m x 3m, avec un ou plusieurs robots dont le but est de marquer des points en réalisant des actions allant du déplacement d’objets au retournement de plaques, de lecture d’informations avec des captures. La plupart des objets à déplacer sont des fossiles représentant les thèmes des dernières compétitions. Le cahier des charges est précis : les robots-archéologues ne doivent pas dépasser 35 cm de hauteur et 120 cm de périmètre.
« Au niveau de la construction, nous changeons pas mal de technologies cette année, donc nous avons refait la base roulante, mais toujours en gardant le travail des années passées, comme les supports des roues calculant la position du robot au fur et à mesure qu’il se déplace. Le projet a commencé en octobre avec beaucoup de recherches et les premières constructions en février. »
Des technologies expérimentées en école d’ingénieurs
Pour créer des robots autonomes bénéficiant d’un maximum de dextérité pour se mesurer à la concurrence, les membres de Davincibot ont testé et mis plusieurs solutions innovantes pour les applications de robotique :
- Des technologies de repérage : LIDAR (système de détection par émissions infrarouges), qui permet de générer une carte 2D de son environnement en temps réel et donc de connaître la position des autres robots/éléments de jeux sur la table ;
- Odométrie : grâce à des roues encodeuses placées sur l’axe des roues, il est possible de connaître les déplacements du robot ;
- Actions sur table (pour gagner des points) : actionneur statuette (équipé d’une pompe), actionneur carré de fouille (scanneur de résistance), actionneur abri de chantier
« Pour contrôler le robot, nous utilisons une carte Raspberry Pi 4 avec des programmes en Python : cerveau principal qui décide des déplacements, des actionneurs à activer… Les composants et moteurs sont reliés à une carte de développement Teensy, qui s’utilise comme une Arduino. Nous pouvons la programmer avec les méthodes dites du « framework Arduino » en C++ ou comme nous l’avons vu en cours de 1re er 2e avec des registres pour un contrôle plus rapide.
Ces 2 cartes sont reliées entre elles par un système codé entièrement par l’équipe, ce qui a été un grand défi technique. Nous espérons pouvoir publier ce code de communication dans un cadre plus large que celui de la Coupe de Robotique. »
Le classement de la Pré-coupe de robotique en version Davincibot
Au terme de plusieurs petites batailles technologiques, c’est Goldorak, équipe professionnelle de l’Electrolab de Nanterre – un des plus grands hackerspace d’Europe – qui a remporté le classement.

Les équipes Intech et Electrolab réunies autour de la table de jeu lors de la Pré-coupe Davincibot
1. Goldorak
2. Davincibot
3. TDS Team 72
4. Intech (Mines Telecom Sud)
« Nous avons gagné un match contre l’équipe Goldorak, et un match contre Intech. Notre robot effectuait beaucoup moins d’action que celui de l’équipe Goldorak et celui de Team TDS. Néanmoins, lors du comptage des points, pleins de petits détail tels que « avancer » ou « retourner à sa position de départ au bout de moins de 2m », sont des aspects qui, mine de rien, sont réalisables facilement et rapportent des points.
Nous étions un peu déçus, car même si nous n’avions pas un robot aussi professionnel que celui de Goldorak et de Team TDS, notre robot était capable de bien plus de choses que ce qu’il a fait. Notre équipe a travaillé dessus toute la nuit la veille de la compétition, mais nous avons rencontré un bug que nous n’avons pas réussi à solutionner. »
Raison de plus pour se donner à fond pour la Coupe qui se déroulera d’ici un mois.
« Cette pré-coupe a été un bon entraînement pour l’équipe, cela pousse tous les membres à se donner au maximum car les adversaires ont un bon niveau. Cela nous a aussi permis de rencontrer d’autres étudiants, ainsi que des équipes venant de Fablabs avec plus d’expérience, avec lesquelles nous avons beaucoup pu échanger. Cela nous a aussi fait comprendre qu’il reste encore plein de travail avant la compétition, et plein de technologies à découvrir pour les années à venir. »