Robotique et défense au programme de ce premier hackathon MBDA remporté par Son-Ha Nguyen, élève-ingénieur à l’ESILV au sein de la majeure informatique Big Data et Objets Connectés, avec son équipe. Récit.
Dans le cadre d’un challenge organisé par MBDA, j’ai participé le 18 novembre dernier, à leur premier Hackathon.
Cette société est spécialisée dans le domaine de la Défense, et, ayant déjà une expérience dans l’Armée de l’Air – j’ai passé 2 ans en école militaire dans l’armée de l’air, à l’Enseignement Technique de l’Armée de l’Air, où j’ai pu recevoir une formation de sous-officier me préparant à l’école des Sous-Officier de Rochefort- je suis très intéressé par cette entreprise, notamment pour la découvrir et essayer d’y obtenir un stage.
MBDA répond aux besoins opérationnels des forces armées et apporte notamment à la France et à l’Europe des capacités essentielles : celles de décider, de s’engager et de garantir leurs intérêts fondamentaux en matière de sécurité et de défense.
Des équipes pluridisciplinaires pour un hackathon robotique
Les équipes ont été formées par MBDA. J’ai dû donc travailler avec d’autres élèves ingénieurs, qui ne suivent pas le même cursus que le mien. Certains venaient de Centrale Paris, d’autre d’INSA, de Télécom Saint-Etienne ou encore de Polytech Paris Sud. De plus, chaque équipe était accompagnée par deux experts Logiciel et Électronique de chez MBDA, qui pouvaient nous fournir de l’aide en cas de besoin.
Le pitch du hackathon était le suivant :« La situation géo-politique de la Terre pousse des équipes d’ingénieurs électronique et logiciel à sonder le système solaire à la recherche de nouvelles planètes. Missilon pourrait être l’une d’entre elles. En tant qu’élève ingénieur, tu as été choisi(e) pour l’étudier. Tu dois y effectuer des relevés pour déposer un camp de base dans une zone non hostile. »
L’objectif du Hackathon était donc de concevoir de A à Z un prototype de robot contrôlé à distance par une tour de contrôle. Le robot devait aller d’un point A à un point B, en recevant des informations seulement de la tour de contrôle. De plus nous devions développer une interface homme-machine (IHM) pour permettre de lancer le robot ou de l’arrêter.
Techniquement, nous avons fait en équipe des choix pour la réalisation du roboto. Au niveau des langages utilisés : Java pour l’IHM, C sous Arduino pour le robot, et du Python pour le scan. Côté électronique, cartes et capteurs, nous avons utilisé une Raspberry Pi, une Arduino Uno et un capteur Ultrasons.

Ambiance de travail studieuse au hackathon robotique organisé par MBDA
Un accompagnement par le staff Usine.io pour structurer la démarche projet
Nous étions encadrés par le staff de l’Usine.IO, organisme qui accompagne les entreprises dans leurs projets, afin qu’ils soient mieux structurés.
Par conséquent, lors du déroulement de la journée, ces derniers nous ont aidés dans notre démarche de prototypage, en commençant par l’architecture globale, en passant par de la programmation, et en finissant par un pitch.
A la fin de la journée, notre prototype était capable , de scanner l’environnement du robot. De plus, nous avions un robot fonctionnel qui avançait, et nous avions une ébauche d’IHM permettant d’actualiser la position du robot.
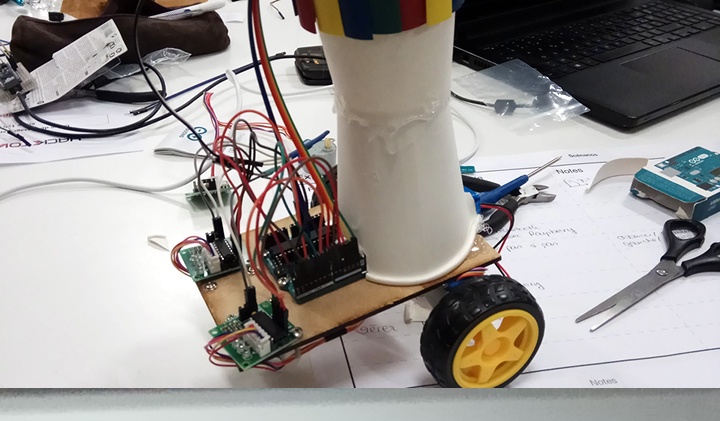
Un prototype de robot fonctionnel développé en une journée de hackathon intense
Une victoire pour l’équipe de Son-Ha
Cette journée s’est conclue sur les pitchs des différentes équipes, et au terme des délibérations du jury, mon équipe est arrivée première exæquo avec une autre : une belle victoire !
Cette journée m’a permis d’avoir un challenge personnel, de travailler avec d’autres étudiants qui ne sont pas issus de la même école que la mienne, et de découvrir la société MBDA plus précisément.
Au final, une journée passionnante autour de la robotique : un grand merci à MBDA et à l’Usine.IO pour cet évènement !

En équipe, une victoire méritée !