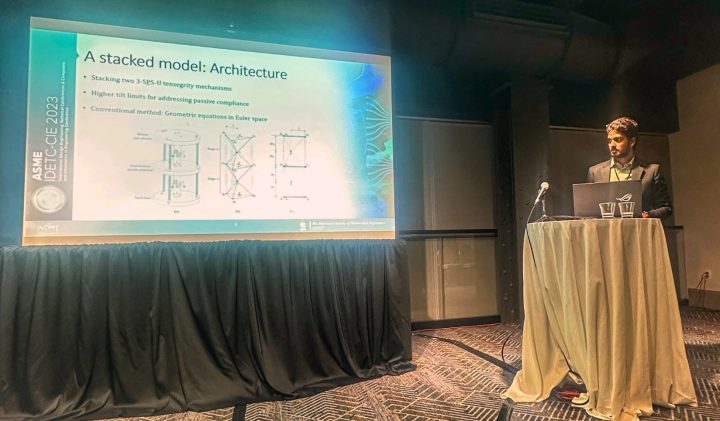
Swaminath Venkateswaran, a teacher-researcher in mechatronics at ESILV, presented his research paper entitled “Design and Analysis of a Series-Parallel Hybrid 3-SPS-U Mechanism” at the ASME-IDETC 2023 international conference, held in Boston, USA.
This research study was part of the Mechanisms and Robotics session of the annual ASME-IDETC conference. It provides a valuable platform for students, PhDs, post-docs and professors to present their contributions to mechanical engineering.
What are Serial-Parallel Robots?
In robotics, there are two main types of robots: serial robots, which comprise components linked in a linear sequence, and parallel robots, which involve closed-loop links between two platforms.
A parallel, serial robot combines elements of both architectures, exploiting the advantages of serial robots, such as a large workspace and the rigidity advantages of parallel robots.
Swaminath’s work focuses on a specific type of parallel serial mechanism known as a hybrid 3-SPS-U. T
The Hybrid 3-SPS-U mechanism
Swaminath’s main area of research is the design and development of robots for pipe inspection.
His work has led to the creating of a bio-inspired, rigid, caterpillar-like inspection robot designed to make contact with the pipe walls.
Initially, a rigid model was proposed, limiting its application to straight pipes. Swaminath introduced a single-stage 3-SPS-U architecture between the robot modules to improve flexibility.
However, the tilt angles provided by this mechanism needed to have been sufficient to navigate pipe bends or junctions effectively.
To solve this problem, Swaminath designed and analysed a stacked model, incorporating an additional 3-SPS-U mechanism, enabling the inspection robot to overcome 90-degree bends.
Analysis of 3-SPS-U architectures
Singularities pose significant challenges in robotics, and efforts are being made to avoid them.
A comprehensive singularity analysis has been carried out to understand the possible workspaces of the mechanism and identify tilt limits.
Traditional approaches involve analysis in Euler space, which becomes more complex in the presence of four degrees of freedom.
In his previous research published in a journal, Swaminath proposed an alternative approach using Tilt and torsion space, simplifying the calculations.
This approach has been extended to the stacked model to solve and validate singularity problems.
Future publications
The simulation of the mechanism has been successfully validated, and ongoing work involves experiments to identify the actual tilt limits, taking into account external factors such as cable friction.
Following validation, a detailed research paper will be published in a journal.
Discovering cable-controlled robots and robots with degrees of freedom
In addition to his presentation, Swaminath had the opportunity to attend other exciting sessions, including those focusing on cable-controlled robots and high-degree-of-freedom robots like the Nimbl’bot.
In his area of expertise, he also participated in discussions with researchers worldwide, including former colleagues from LS2N in Nantes.
About ASME and IDETC/CIE
ASME (American Society of Mechanical Engineers) helps the global engineering community find solutions to real-world challenges.
It is a nonprofit professional organisation that promotes collaboration, knowledge sharing, and skills development in all engineering disciplines while emphasising the vital role of the engineer in society.
Expand your design and manufacturing engineering community by joining 1,000 other professionals at IDETC-CIE 2023 in Boston, MA this August: https://t.co/JauaF3F8dz pic.twitter.com/9GGKFkyLtM
— ASME.org (@ASMEdotorg) August 17, 2023
This year, IDETC/CIE 2023 highlighted emerging technologies that have impacted the critical engineering issues of product design and development, manufacturing, and the management and integration of information systems throughout the product lifecycle.
To find out more about the Digital Modelling & Mechanics major